

Introductions:
Hello Technos!
Next step is to reload a new Linux distro in the Tiny6140 board.Sad thing to tell was that all the documentations were written in Chinese language(that's I think- how I ventured to its lesser price/cost).Anyway , Google is there for the translations and firefox add-ons was able to decode whatever Chinese encoding format available as a text inputs. This is a little bit tricky and cracky that I need to rely in free e-books available on the net.Most of the docus' are based in ARM9 but not in an ARM11 architecture, though I need to get it done as soon as possible.
However, I've found out that some binary compiler may work in ARM9 as well as in ARM11 architecture ,yet others soft-apps may not ie; kernel ,loader and partition formatter .So then I referred to those images and binaries that functions to both boards (gcc, ,tar ,bin's and etc.).
As usual here are the steps and details(have fun!)
As usual here are the steps and details(have fun!)
Requirements:
Softwares:
Linux or Windows XP- use either software SD flasher -making boot loader binaries bootable to SD card
USB driver -so that your PC will recognized the board USB port
DNW virtual- USB console
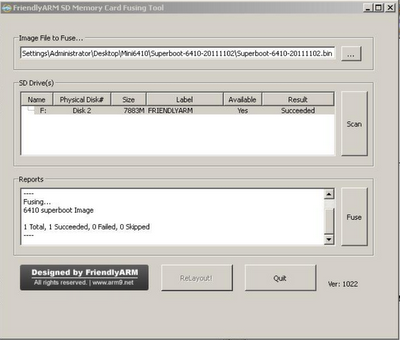
superboot20110826.bin -bootloader
rootfs_qtopia_mcl2.ubi -partition formatter
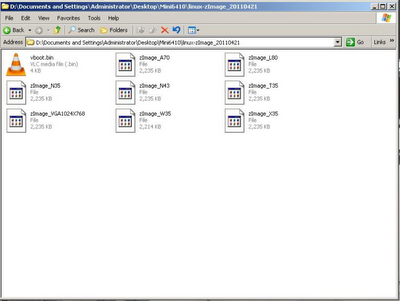
zimage_vga1024x768.bin -kernel
Hardwares:
Tiny6140 (ARM11) -embedded boardusb cable -interface to shell of Tiny6140
serial cable-interface as access to USB link by DNW
Objectives:
1) To install Linux in ARM11(Tiny6140) embedded board
2) To boot Linux OS in a NAND Flash (ROM) of an ARM11 target board
3) To simplify a hardcore embedded board set-up
Methodology:
1) You must have downloaded all the software required
2) Configure the serial com in your PC ("HyperTerminal) ,
2.a)Program->Accessories->Communications-HyperTerminal
2.b)setting are : 11520,8,N,0
2.c)you should see the virtual COM (HyperTerminal) display is responding to the character as output of the Tiny6140 board
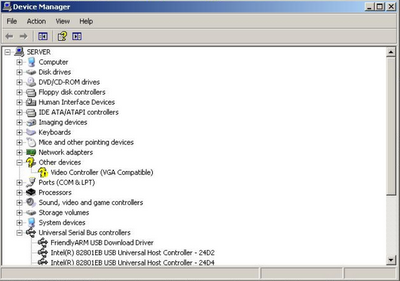
3) Install the USB driver for the Tiny6140, the reason is for your board be detected by the PC-now you have 2 access in your PC via serial and via USB.
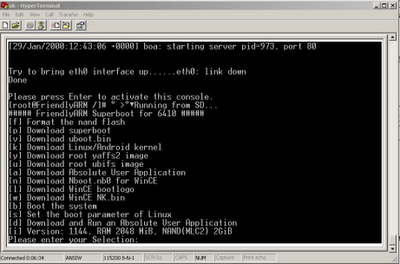
4) In your PC HyperTerminal should display options:
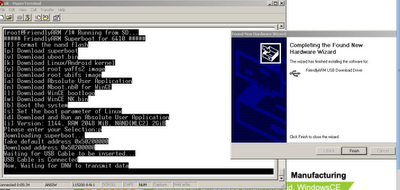
4.a) First,press "p" to load the superboot loader , the board will call the DNW to transmit the superboot(superboot20110826.bin) binary(you should kept that huh?)
4.b) Then, press "k" to load the kernel(zimage_vga1024x768.bin) , the board will call the DNW to transmit the kernel image (you have there for LCDs and VGAs image-find it!).
4.c) Then press "u" for ubi format of your board disk partitioning(rootfs_qtopia_mcl2.ubi ) , the board will call the DNW to transmit the qtopia UBI binary image.
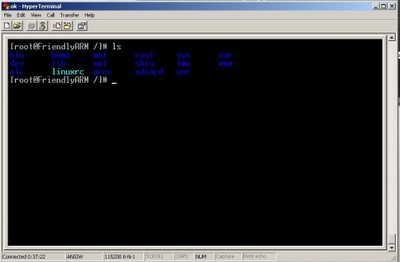
5) You should see the rolling characters , until you will stumble to the prompt asking you to press in any keys for it to display the console(shell)
6) Turn off the board , then switch S2 to NAND booting
7) That is it, Tiny6140 board will now proceed booting via NAND flash.
Details(1)Downloading kernel images
Details(2) SD flasher detecting the SD card
Details(3)After by superboot format ,options prompt appear during boot up
Details(4)Included USB driver (installed usb_driver.zip) Windows "Device Manager"
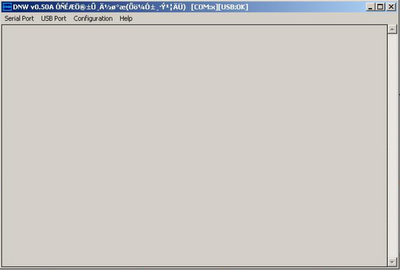
Details(5)DNW called by the Tiny6140 board(detected USB)
Details(6)DNW [OK] ready to transmit bins and images
Details(7)Flashing the NAND memory

Details(8)Almost finished loading
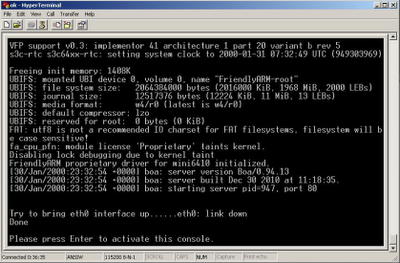
Details(9)Finally the Tiny6140 shell appear-and were done!
Remarks:
1)Next , booting Android/Linux/WinCE/Ubunto OS to the Tiny6140 board
2)As simple as that hardcore embedding
Conclusions:





















{kind=link}